




Kaksoislinssinen video bussi linja-auto laskenta kamera ihmisten lukeminen bussi matkustajien lukeminen kamera
Tämä järjestelmä käyttää kaksilinsikohtaisia kamerioita, jotka hyödyntävät 3D-syvyysalgoritmeja dynaamisen havaitsemiseen matkustajien risteilyjä, pituutta ja liiketrajectoreja, varmistamaan korkean tarkkuuden reaaliaikaisen matkustajavirtadata.
- Yleiskatsaus
- Suositellut tuotteet
Avainominaisuudet

kaksoislinssinen video bussi linja-auto laskenta kamera ihmisten lukeminen bussi matkustajien lukeminen kamera
Infrapunasvalo kuljettajavirtaus-tunnistuskamerassa sopeutuu mihin tahansa valoympäristöön, toimii edelleen myös täysissä mustinaoloissa.
Sisäänrakennettu itsenäinen digitaalinen I/O-portti, joka voidaan yhdistää muihin laitteisiin tai avata ja sulkea laitteita.
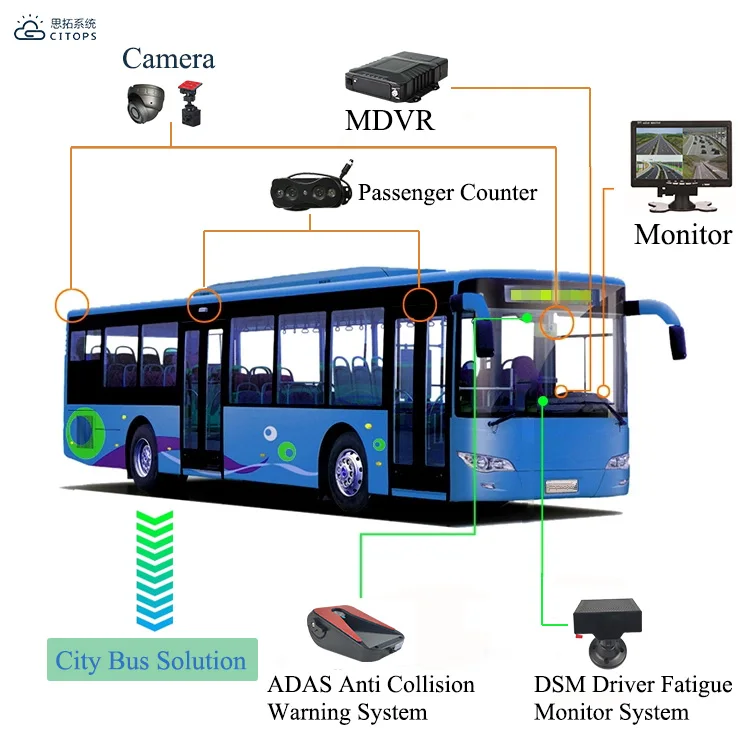
Henkilöiden sisään- ja uloskulkuun liittyvät tilastot voidaan välittää real-aikaisesti 3G/4G-verkon kautta kerätäksesi jokaisen aseman matkustajavirran tiedot real-aikaisesti, välittääksesi ne bussiryhmän matkustajavirran keräämisjärjestelmään ja siirtääksesi ne lopulta liikenteen integroituun tietoympäristöön.
Henkilöiden sisään- ja uloskulkuun liittyvät tilastot voidaan välittää real-aikaisesti 3G/4G-verkon kautta kerätäksesi jokaisen aseman matkustajavirran tiedot real-aikaisesti, välittääksesi ne bussiryhmän matkustajavirran keräämisjärjestelmään ja siirtääksesi ne lopulta liikenteen integroituun tietoympäristöön.
Tekniset tiedot
Tekniset tiedot |
parametrit |
Kuvaanturi |
1/3CMOS |
Videomuoto |
PAL/NTSC (valinnainen) |
Vaakarakenne |
700 TV-viivaa |
Kuvan tuloste |
Samanaikainen näytteilytuloste |
Linssien välimatka |
5cm (12cm valinnainen) |
Linssiparametrit |
960*576 pikseliä, 2.8 mm (2.8mm/3.6mm/4mm/6 mm valinnainen) |
Valkotasapaino |
Automaattinen |
Katkaisin |
1/50-1/80000 (sekuntia) 1/60-1/80000 (sekuntia) |
Kehysnopeus |
25 (kuvaa/sekunti) |
Videotulostusliittymä |
Yhdistetty videotuloste, 75Ω 1Vp-p BNC |
Voitto |
automaattinen voimakkuusteho |
Signaali-kohinasuhde |
ï¼¾48db |
Teho |
5-24V jännite syöte |
Työvirta |
370MAâ¤흼 |
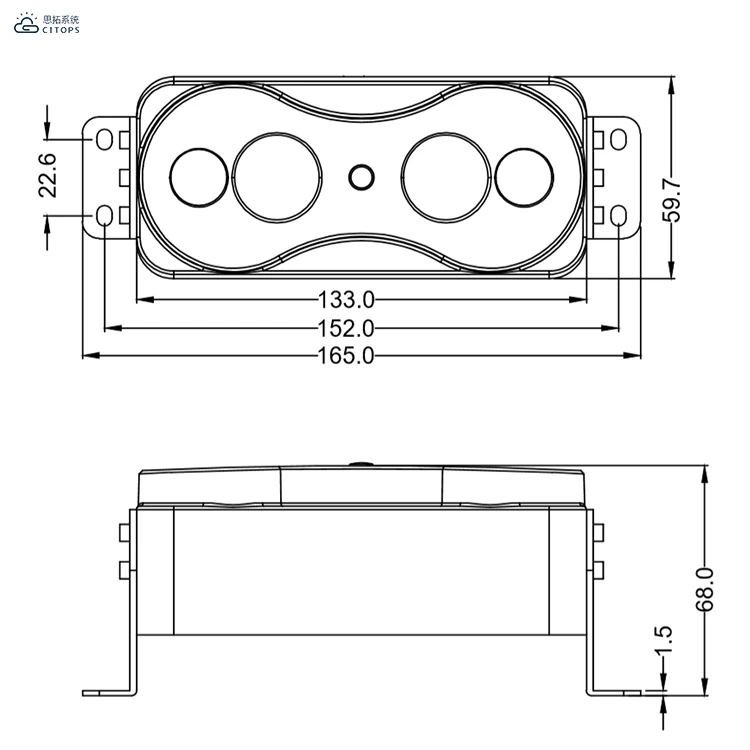
Koko |
133(W)mmx50(H)mmx59.65(L)mm (P×L×K) |
Paino |
noin 0,35kg (yksittäinen kamera) |
Käyttölämpötila-alue |
-20~+70°C |
Suhteellinen kosteus |
10%–90% ilman kondensoitumista |
Lämpötilan hallinta |
Passiivinen rakenteellinen lämpönsiirto |
Tiedot kuvina




Liikennelaskuri voidaan käyttää bussissa, metrossa, junassa, laudalla, ostoskeskuksessa, rakennuskanaalissa jne. Sen voi asentaa helposti oven, katolin, seinän tai takan päälle ja muihin paikkoihin.

Henkilöliikenne-tunnistuskamera kiinnittää videokuvan, analysoi kaikkien kuva-objektien korkeuden, muodon ja suunnan, jotta se pystyy tarkasti arvioimaan ihmisten määrää ja pääsy- ja poistumissuuntaa sekä luomaan pääsytapahtuman.

Yrityksemme

Shenzhen Citops Systems Co.Ltd. (Lyhyesti Citops Systems) on ammattimainen integroitu videokommunikaatiojärjestelmien ratkaisutoimittaja sekä luotettava asiakkaiden kumppani, joka yhdistää tutkimus- ja kehitys-, suunnittelu-, tuotanto- ja myyntiosastot. Tarjoaa edistyksellisiä kokonaisvaltaisia turvallisuusvalvontatuotteita ja korkealaatuisia palveluita.
Pyyhkii tarjoamaan Citops-ratkaisuja videoiturvallisuusvalvonnalle eri aloilla, kuten rahoitus, julkinen liikenne, urheilu, koulutus, kuluttajat, oikeusjärjestelmä, telekom, poliisi jne. Palvelee asiakkaita ympäri maailmaa parhaalla tehokkuudella, suurimmalla turvallisuudella ja parhailla palveluilla.

Meidän edut

Sertifiointi

Näyttely

UKK








